







ROVER MANIPULATOR allow to lift, move and rotate your particulars with weight from 1 to 100 kg with the utmost simplicity thanking to an ergonomic system, easy to be used.
In order to the type of handling, rover manipulator could be equipped of different gripping systems, as like: pneumatic grippers, magnet or suction cup.
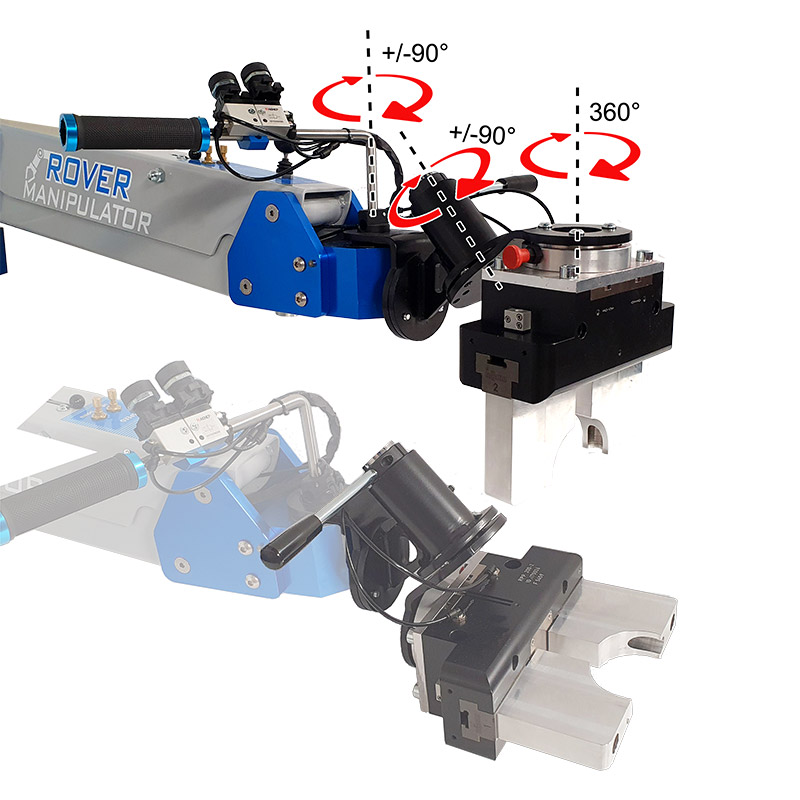
During the manipulation is also possible to rotate the items in desired position before laying
| Model | LIFTING | Workray | VERTICAL RACE | ANCHORING SYSTEM | Weight | Pressure | SPEED REGULATION | OPERATING TEMPERATURE | ROTATION |
|---|---|---|---|---|---|---|---|---|---|
| kg | mm | mm | Kg | bar | |||||
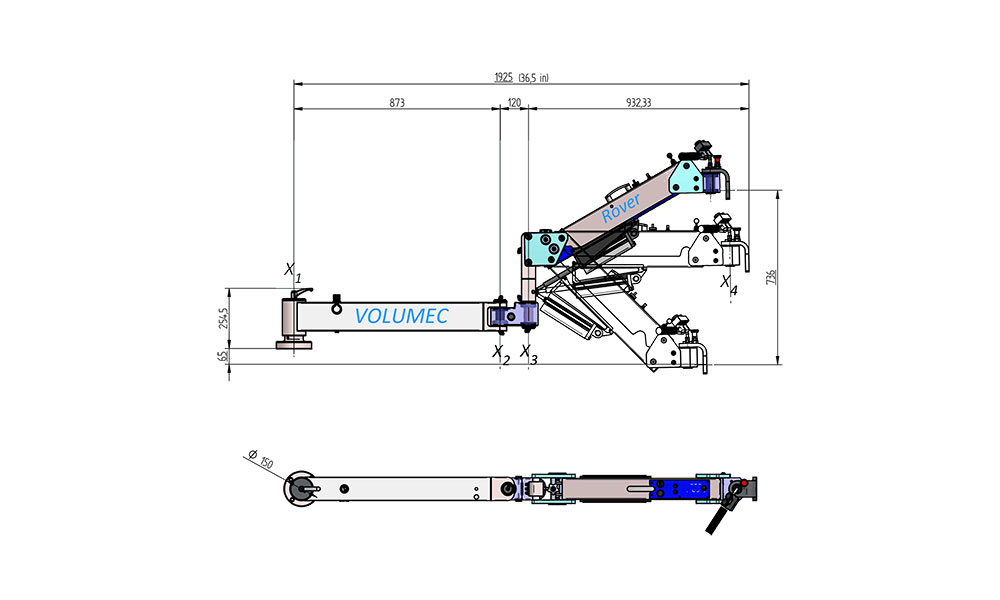
| RM01 | 1 - 100 | 1915 + Head | 736 | Pneumatic Magnet, Suction Cup or Pneumati Gripper | 60 | 6-8 | going and return | 10°-45° | 360° |
| RM02 | 1 - 50 | 1685 + Head | 736 (+500 Regulation) | Pneumatic Magnet, Suction Cup or Pneumati Gripper | 40 | 6-8 | going and return | 10°-45° | 360° |
Working Area RM01
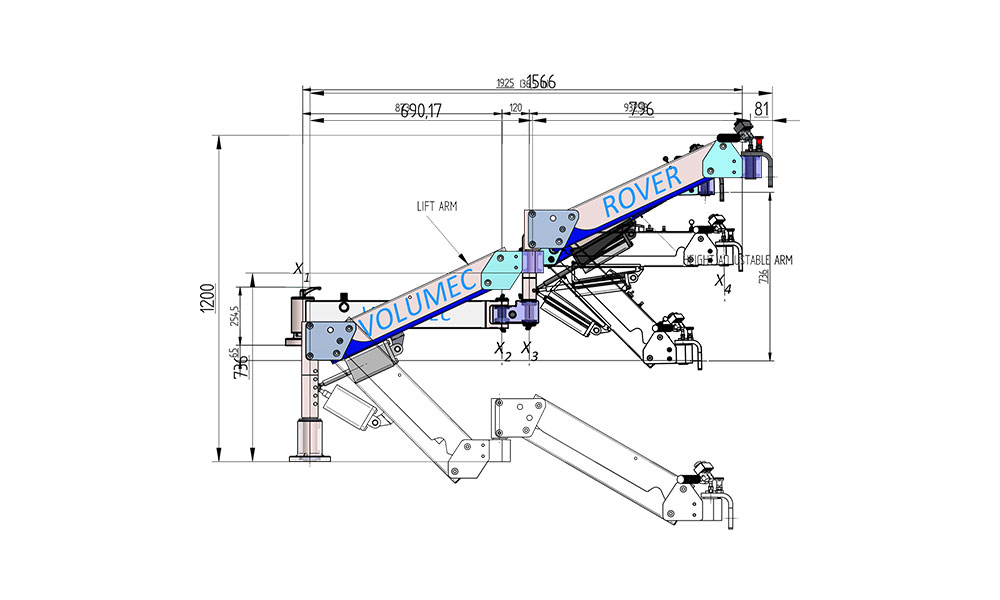
Working Area RM02
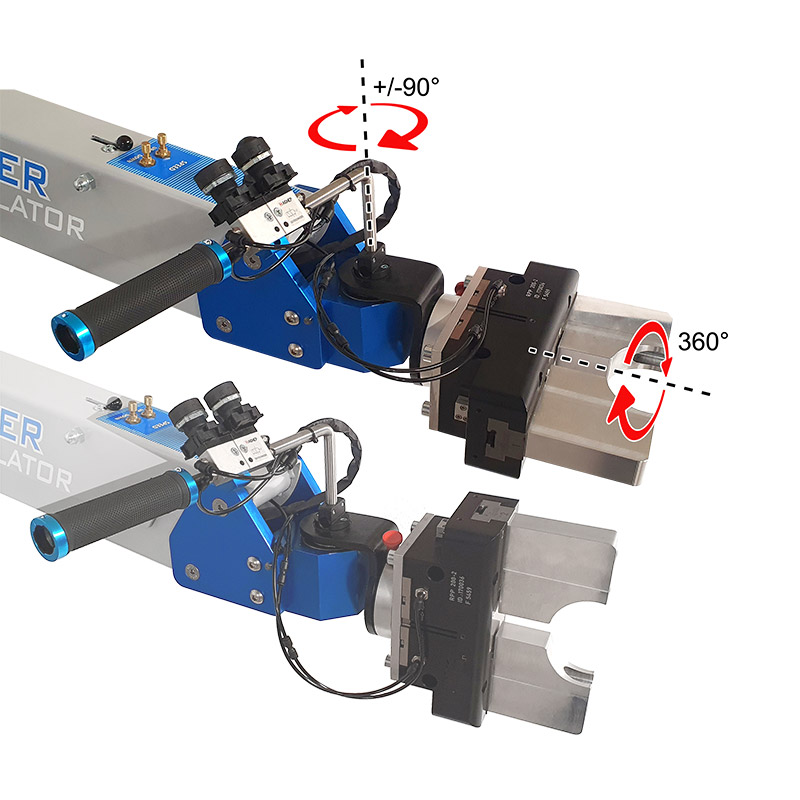
Head member on two rotation axes
Head member on three rotation axes



Total height H= 500 mm
Weight : 350 Kg

Total height H=500 mm
Equipped with electric motorized trolley.

Column with H= 1060 mm and stroke 600mm
Material handling through brushless motor 400W – 220 V,
Piloting by electronic accelerator and up and down buttons.
Weight : 400 Kg

Electric motorized trolley.
Column with H= 1060 mm and stroke 600mm
Material handling through brushless motor 400W – 220 V,
Piloting by electronic accelerator and up and down buttons.
Total weight 480 kg.

Column with H=1060/1460 mm and stroke 600/1000 mm.
Material handling through brushless motor 400W – 220 V,
Designed for floor fixing

Length from 2000 to 4000 mm with manual movement (motorized optional)